

![图片[1]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/03/1616474041-bc29f68a2d5aaf17.png)
前言:
我的Voron2.4 一直用LDO0.9+5160tmc驱动,打印效果我还是很满意的,就是噪音,怎么调试都无果,所以就有了上闭环的想法,但是我没选择在电机屁股改装闭环板的方案,总觉得不靠谱,偶然在咸鱼 看到了韩国的S-SERVOII MINI感觉还不错就弄回来折腾了!
教程:
![图片[2]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929105804869.png)
接完线大致就是这个样子了!
耗材:
![图片[3]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929110143219.png) 501646-2000 501646-2000 |
![图片[4]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929110155622.png) 501648-1000 501648-1000 |
![图片[5]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929110330635.png) 501646-1000 501646-1000 |
501648-1000 |
![图片[7]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929110532859.png) SMP-09V-NC SMP-09V-NC |
![图片[8]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929110539890.png)
SHF-001T-0.8BS |
![图片[9]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929155902811.png) PAP-04V-S PAP-04V-S |
![图片[10]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929155926833.png) SPHD-001T-P0.5 SPHD-001T-P0.5 |
![图片[11]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929160109332.png) 5557-04R 5557-04R |
![图片[12]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929160132495.png) 5556T 5556T |
![图片[13]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929160244231.png)
PAP-02V-S |
SPHD-001T-P0.5 |
![图片[15]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929161909180.png)
外置驱动转接 |
外置驱动的转接线,这里我提供个淘宝的店家你们可以入手 |
以上是需要的联结件,按照图片下面有编号去淘宝直接搜索即可!
线序:
注意:Housing是胶壳 Terminal是端子
电源线:
![图片[16]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929160516392.png)
电机线:![图片[17]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/themes/zibll/img/thumbnail-lg.svg)
![图片[17]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929160620521.png)
![图片[18]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929160958844.png)
编码线:
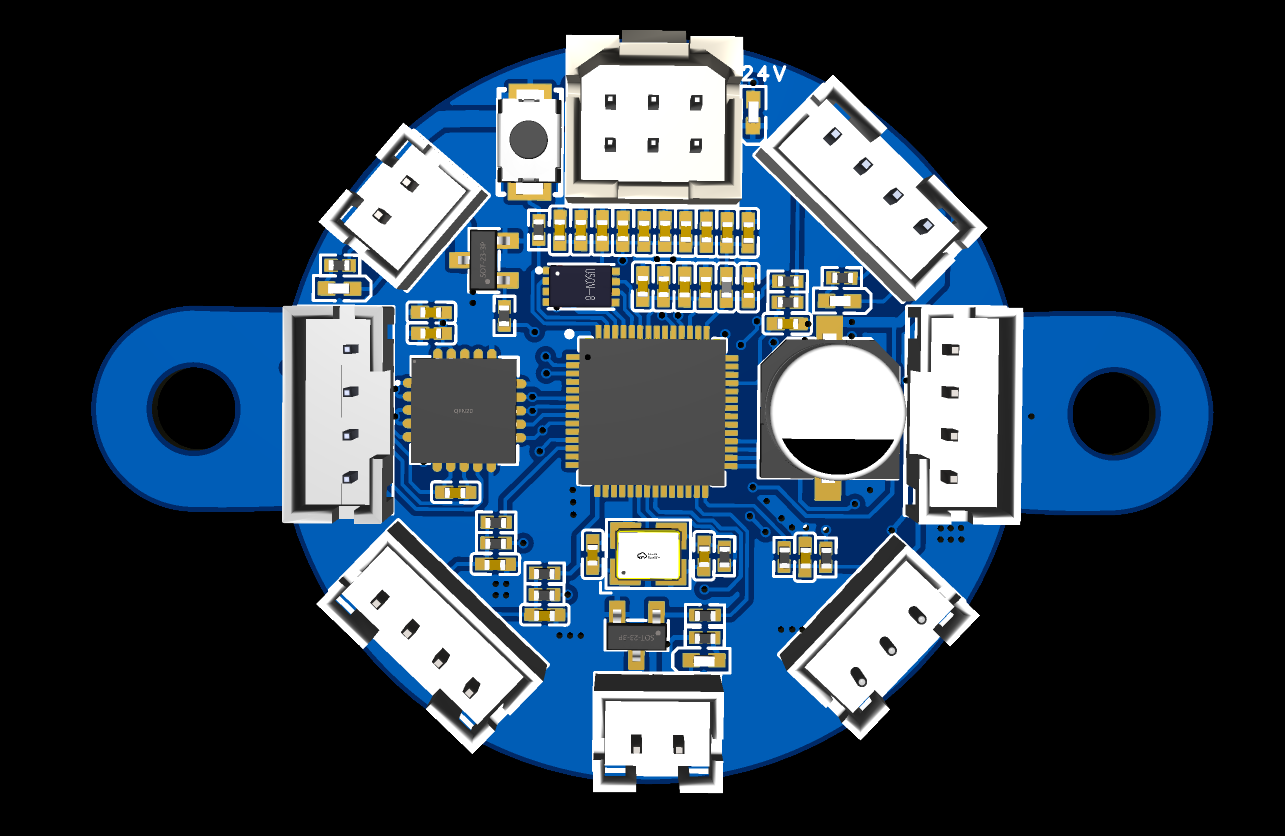
外置驱动针脚定义:
![图片[19]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929160651254.png)
![图片[20]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929161011924.png) 外置驱动针脚定义:
外置驱动针脚定义:主板与外置驱动连接:
![图片[21]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929161203570.png)
3d打印机主板上的原有驱动插槽要拆掉驱动模块,插入买到的外置驱动转接,在插入之前去掉针对原有驱动的跳冒。
![图片[22]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929162306557.png) |
注:数字对应的是上面的定义图内容(22.8) |
Klipper配置:
[stepper_x] ## Connected to X-MOT (B Motor) step_pin: PE11 dir_pin: !PE10 enable_pin: !PE9 rotation_distance: 40 microsteps: 16 细分 full_steps_per_rotation:100 脉冲 endstop_pin: ^PB14 position_min: 0 position_endstop: 350 position_max: 350 homing_speed: 25 #Max 100 homing_retract_dist: 5 homing_positive_dir: true #[tmc5160 stepper_x] #spi_bus: spi4 #cs_pin: PE7 #diag1_pin: PB14 #interpolate: True #run_current: 1.3 #hold_current: 0.9 #sense_resistor: 0.075 #stealthchop_threshold: 99999
注释掉 原有驱动的参数配置! 修改脉冲以及细分数据,这里注意 具体给多少数值,要看驱动器那边配置了一圈多少脉冲!
![图片[23]-Voron 2.4 升级韩国S-SERVOII MINI 闭环电机坑记-RSG-人生观](https://www.lxg2016.com/wp-content/uploads/2021/09/20210929162855312.png) 注意 : 3D打印机 一般建议1000 1600的脉冲,太高了 MCU 可能会出现性能不足导致打印途中停止!
注意 : 3D打印机 一般建议1000 1600的脉冲,太高了 MCU 可能会出现性能不足导致打印途中停止!
设定自己想要的脉冲,在驱动器侧边针对想要的脉冲调整拨片!我给的是1600/一圈 ,之后Klipper内细分乘以脉冲等于1600即可!这里有个小问题 脉冲的数值必须是100的整数,10 20 50 1-9 这样的数值写入,klipper 会提示无效!
结尾:
到此更换 韩国的闭环就结束了,我更换的时候在拨片调整脉冲的位置被卡了一天,现在分享给大家,希望大家换闭环电机顺利
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END


- 最新
- 最热
只看作者